
Page 233 - บทความแนวปฏิบัติที่ดี KM มทร.+2 ครั้งที่ 10
P. 233
227
5. ทดสอบการเชื่อมต่อระหว่างรถส ารวจและโปรแกรมควบคุมการท างาน
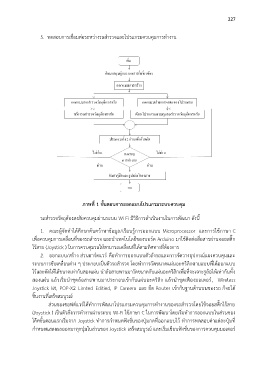
ภาพที่ 1 ขั้นตอนการออกแบบโปรแกรมระบบควบคุม
รถส ารวจวัตถุต้องสงสัยควบคุมผ่านระบบ Wi-Fi มีวิธีการด าเนินงานในการพัฒนา ดังนี้
1. คณะผู้จัดท าได้ศึกษาค้นคว้าหาข้อมูล/เรียนรู้การออกแบบ Microprocessor และการใช้ภาษา C
เพื่อควบคุมการเคลื่อนที่ของรถส ารวจ และน าเทคโนโลยีของบอร์ด Arduino มาใช้ติดต่อสื่อสารผ่านจอยสติ๊ก
ไร้สาย (Joystick ) ในการควบคุมรถให้สามารถเคลื่อนที่ได้ตามทิศทางที่ต้องการ
2. ออกแบบ/สร้าง ส่วนฮาร์ดแวร์ คือท าการออกแบบตัวถังรถและการจัดวางอุปกรณ์แผงควบคุมและ
ระบบการขับเคลื่อนต่าง ๆ ประกอบเป็นตัวรถส ารวจ โดยท าการวัดขนาดแผ่นอะคริลิกตามแบบที่ได้ออกแบบ
ไว้และตัดให้ได้ขนาดเท่ากันสองแผ่น น าล้อสายพานมาวัดขนาดกับแผ่นอะคริลิกเพื่อที่จะเจาะรูล้อให้เท่ากันทั้ง
สองแผ่น แล้วเริ่มน าชุดล้อสายพานมาประกอบเข้ากับแผ่นอะคริลิก แล้วน าชุดเฟืองมอเตอร์, Wireless
Joystick kit, POP-X2 Limted Editied, IP Camera และ ยึด Router เข้ากับฐานด้านบนของรถ ก็จะได้
ชิ้นงานที่เสร็จสมบูรณ์
ส่วนของซอฟต์แวร์ได้ท าการพัฒนาโปรแกรมควบคุมการท างานของรถส ารวจโดยใช้จอยสติ๊กไร้สาย
(Joystick ) เป็นตัวสั่งการท างานผ่านระบบ Wi-Fi ใช้ภาษา C ในการพัฒนาโดยเริ่มท าการออกแบบในส่วนของ
โค๊คขั้นตอนแรกเริ่มจาก Joystick ท าการก าหนดฟังชั่นของปุ่มกดที่ออกแบบไว้ ท าการทดสอบค่าแต่ละปุ่มที่
ก าหนดแสดงผลออกมาทุกปุ่มในส่วนของ Joystick เสร็จสมบูรณ์ และเริ่มเขียนฟังชั่นของการควบคุมมอเตอร์